 Grasping-cables-from-cluttered-scenes-exploiting-the-grasping-samples-approach-The-grasp
Grasping-cables-from-cluttered-scenes-exploiting-the-grasping-samples-approach-The-graspAbstract
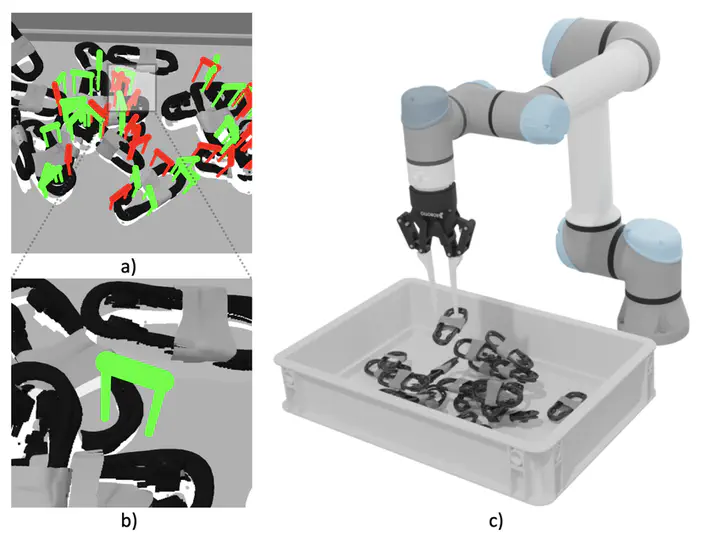
We introduce a Cable Grasping-Convolutional Neural Network (CG-CNN) designed to facilitate robust cable grasping in cluttered environments. Utilizing physics simulations , we generate an extensive dataset that mimics the intricacies of cable grasping, factoring in potential collisions between cables and robotic grippers. We employ the Approximate Convex Decomposition technique to dissect the non-convex cable model, with grasp quality autonomously labeled based on simulated grasping attempts. The CG-CNN is refined using this simulated dataset and enhanced through domain randomization techniques. Subsequently, the trained model predicts grasp quality, guiding the optimal grasp pose to the robot’s controller for execution. Grasping efficacy is assessed across both synthetic and real-world settings. Given our model’s implicit collision sensitivity, we achieved commendable success rates of 92.3% for known cables and 88.4% for unknown cables, surpassing contemporary state-of-the-art approaches. Supplementary materials can be found at https://leizhang-public.github.io/cg-cnn/.
Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.
Qiang Li
Professor and header of AG
My research interests include underwater robot, collaborative robots, humanoid robots.