Arbeit Gruppe Dexterous Robotics (AGDR)
Arbeit Gruppe Dexterous Robotics (AGDR)
Tour
News
People
Events
Publications
Contact
Paper-Conference
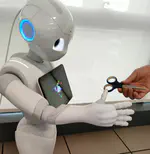
Combining VLM and LLM for Enhanced Semantic Object Perception in Robotic Handover Tasks
We are utilizing a combination of Large Language Model (LLM) and Vision Language Model (VLM) to perform a robot-to-human handover task …
Jiayang Huang
,
Christian Limberg
,
Syed Muhammad Nashit Arshad
,
Qifeng Zhang
,
Qiang Li
PDF
DOI
A Collision-Aware Cable Grasping Method in Cluttered Environment
We introduce a Cable Grasping-Convolutional Neural Network (CG-CNN) designed to facilitate robust cable grasping in cluttered …
Lei Zhang
,
Kaixin Bai
,
Qiang Li
,
Zhaopeng Chen
,
Jianwei Zhang
PDF
DOI
A Robust Model Predictive Controller for Tactile Servoing
We are utilizing a combination of Large Language Model (LLM) and Vision Language Model (VLM) to perform a robot-to-human handover task …
Shuai Wang
,
Yihao Huang
,
Wang Wei Lee
,
Tianliang Liu
,
Xiao Teng
,
Yu Zheng
,
Qiang Li
PDF
DOI
Multi-fingered Tactile Servoing for Grasping Adjustment under Partial Observation
Grasping of objects using multi-fingered robotic hands often fails due to small uncertainties in the hand motion control and the …
Hanzhong Liu
,
Bidan Huang
,
Qiang Li
,
Yu Zheng
,
Yonggen Ling
,
Wangwei Lee
,
Yi Liu
,
Ya-Yen Tsai
,
Chenguang Yang
PDF
DOI
«
Cite
×